
CUAV V5 NANO Autopiloto Pixhawk




CUAV V5 NANO Autopiloto Pixhawk
Crear nueva Reseña
3
SKU:
N/A

- Stock Real de Productos
- Envíos 3.95€ o Gratis*
- Pago a Plazos
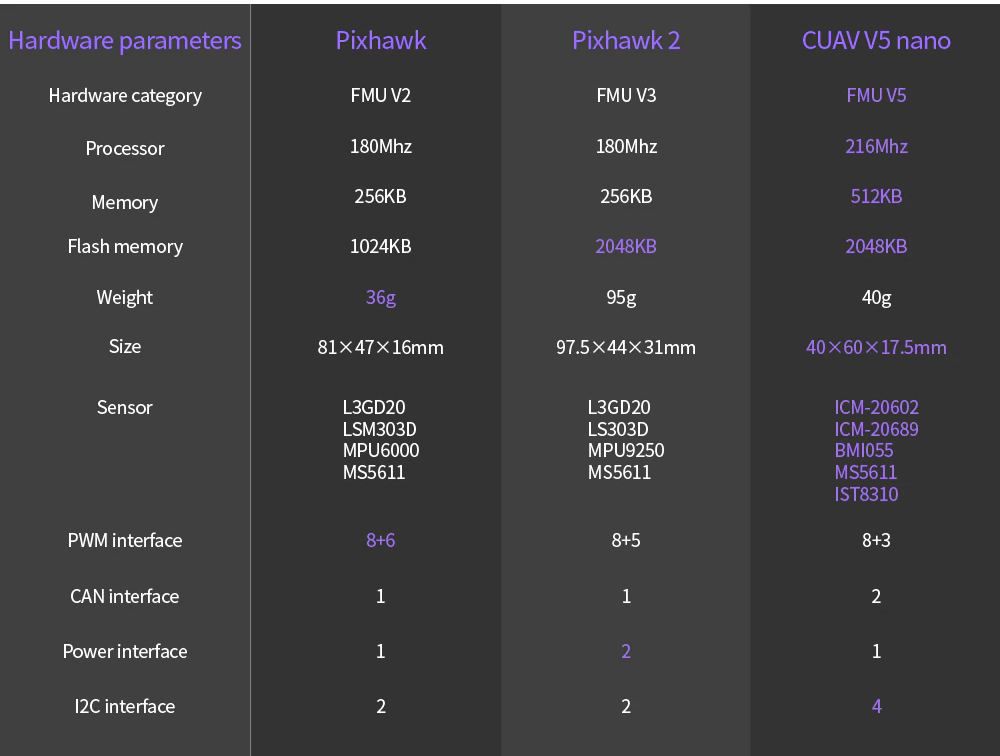
CUAV V5 nano es un piloto automático para aplicaciones con limitaciones de espacio diseñado por CUAV en colaboración con el equipo PX4. Se basa en el estándar de diseño Pixhawk FMUv5 y está optimizado para ejecutar el firmware PX4, y también es compatible con el firmware ArduPilot.
Características:
Procesador STM32F765 Arm® Cortex®-M7 de 32 bits, 216 MHz, 2 MB de memoria, 512 KB de RAM.
Basado en Pixhawk FMUv5.
Compatible con sistema RTK.
IMU Redundante.

<p>CUAV V5 nano es un piloto automático para aplicaciones con limitaciones de espacio diseñado por CUAV en colaboración con el equipo PX4. Se basa en el estándar de diseño Pixhawk FMUv5 y está optimizado para ejecutar el firmware PX4, y también es compatible con el firmware ArduPilot.</p><p><br></p><p><br></p><h4><b>Características:</b></h4><p></p><p><br></p><ul><li><p>Procesador STM32F765 Arm® Cortex®-M7 de 32 bits, 216 MHz, 2 MB de memoria, 512 KB de RAM.</p></li></ul><ul><li><p>Basado en Pixhawk FMUv5.</p></li></ul><ul><li><p>Compatible con sistema RTK.</p></li></ul><ul><li><p>IMU Redundante.</p></li></ul><p><br></p><p><img src="/web/image/271317/cuav-v5+-autopiloto-pixhawk-imu.jpg?access_token=c841f2f5-cbaa-4879-90ba-e5aa03b8a340" class="pull-left" style=""><br></p><p><br></p><p><br></p><p><br></p>
Productos Sugeridos

CUAV NORA+ Autopiloto Pixhawk

CUAV V5+ Autopiloto Pixhawk
Esta es una vista previa de los productos vistos recientemente por el usuario.
Una vez que el usuario haya visto al menos un producto, este fragmento será visible.
Una vez que el usuario haya visto al menos un producto, este fragmento será visible.
Productos vistos recientemente

Para instalar esta Web App en su iPhone/iPad presione ![]() y después Añadir a la Pantalla Principal
y después Añadir a la Pantalla Principal
