
Holybro Durandal & M9N GPS & PM02 12S (Carcasa Aluminio)








Holybro Durandal & M9N GPS & PM02 12S (Carcasa Aluminio)
Crear nueva Reseña
3
SKU:
N/A

- Stock Real de Productos
- Envíos 3.95€ o Gratis*
- Pago a Plazos
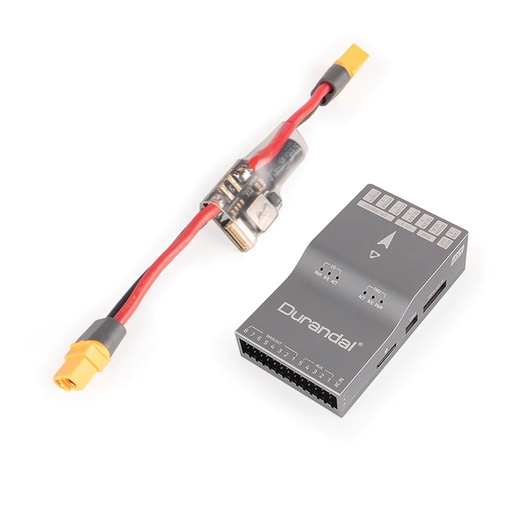
<p>Durandal es un nuevo controlador de vuelo diseñado por Holybro que utiliza la serie de microcontroladores STM32H7.</p><p>A medida que el creciente número de empresas y desarrolladores de drones necesitan ejecutar modelos más potentes y aprovechar capacidades de memoria más integradas, Durandal está diseñado para ofrecer la actualización del rendimiento para las necesidades de desarrollo. La ventaja será útil con características de cálculo intensivas que se requieren.</p><p>Aprovechando nuestra amplia experiencia en construcción de pilotos automáticos en los últimos años, hemos implementado un nuevo sistema de absorción de vibraciones en el diseño mecánico del hardware, y un calentador IMU integrado para el control del templador de sensores.</p><p>Durandal está preinstalado con PX4, y también es compatible con otras pilas de vuelo como Ardupilot.</p><p><br></p><h4><b>Especificaciones técnicas</b></h4><p><br></p><p>Procesador FMU principal: STM32H743</p><p>Arm ® Cortex®-M7 de 32 bits, 480 MHz, 2 MB de memoria, 1 MB de RAM</p><p>Procesador de E/S: STM32F100</p><p>Arm ® Cortex®-M3 de 32 bits, 24 MHz, SRAM de 8 KB</p><p>Sensores integrados</p><p>Accel/Gyro: ICM-20689</p><p>Accel/Gyro: BMI088</p><p>Mag: IST8310</p><p>Barómetro: MS5611</p><p>GPS: receptor ublox Neo-M9N GPS/GLONASS; magnetómetro integrado IST8310</p>
Productos Sugeridos

Holybro Durandal Solo FC (Carcasa Aluminio)

Holybro Durandal & PM06 14S (Carcasa Aluminio)

Holybro Durandal & M9N GPS & PM06 14S (Carcasa Aluminio)
Holybro Durandal & PM02 12S (Carcasa Aluminio)
Esta es una vista previa de los productos vistos recientemente por el usuario.
Una vez que el usuario haya visto al menos un producto, este fragmento será visible.
Una vez que el usuario haya visto al menos un producto, este fragmento será visible.
Productos vistos recientemente

Para instalar esta Web App en su iPhone/iPad presione ![]() y después Añadir a la Pantalla Principal
y después Añadir a la Pantalla Principal
