
* V3 incluye ICM42688-P en vez de ICM20605
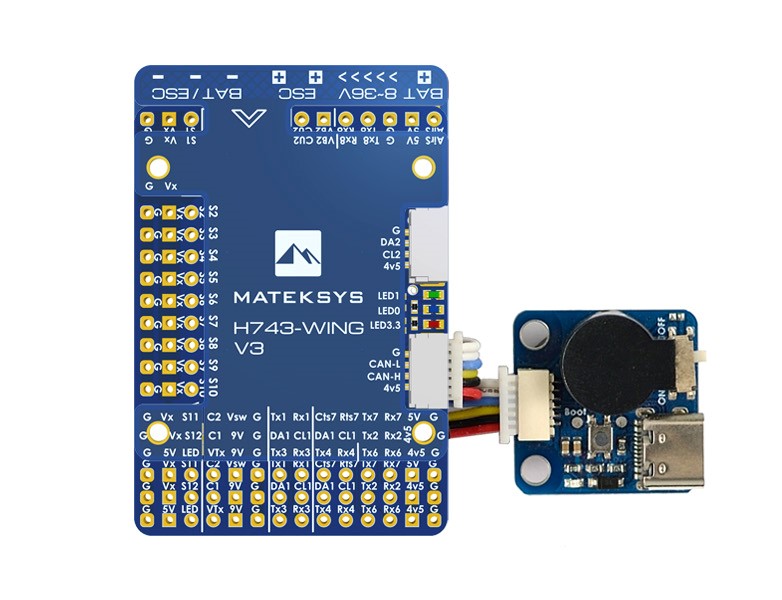
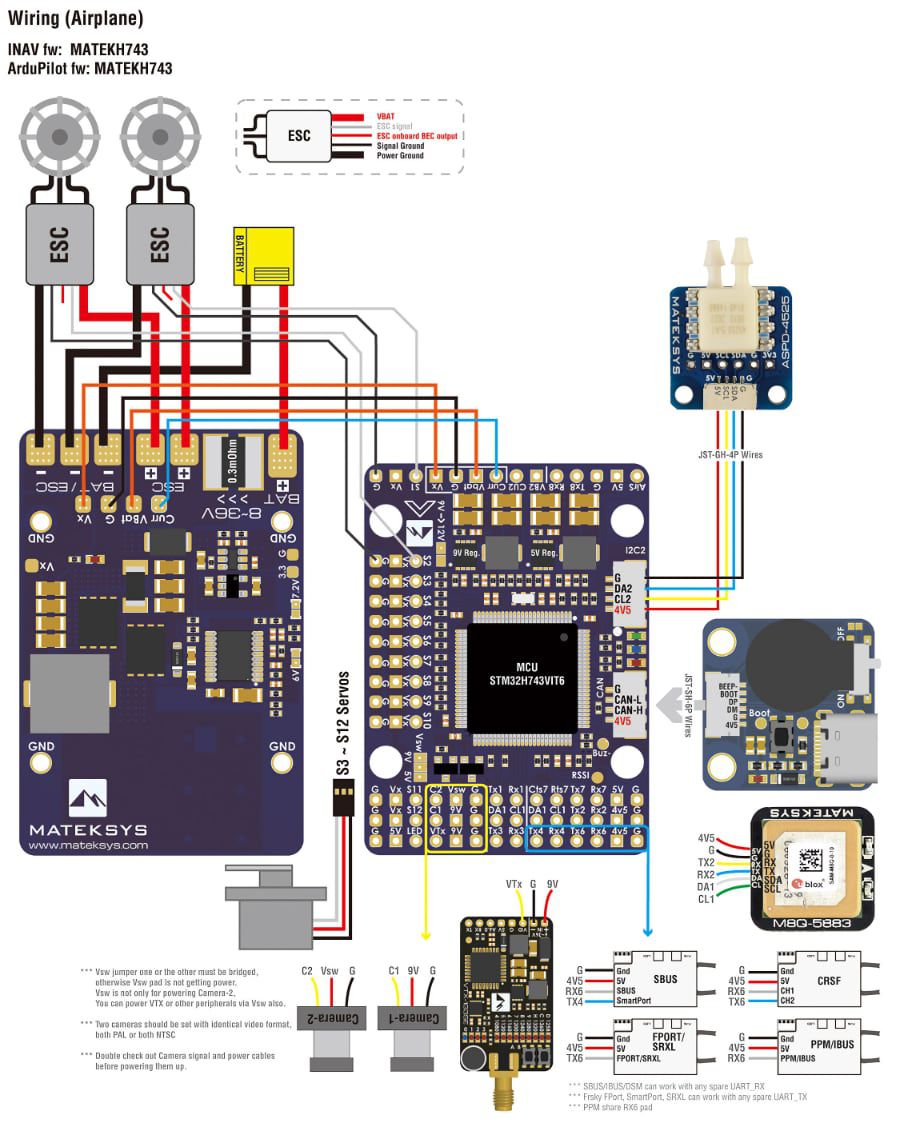
La serie de controladoras de vuelo Mateksys H743, dispone de toda la potencia del procesador F7, pero el H7 ahora cuenta con más puertos. Este autopiloto tiene hasta 13 salidas de servo PWM, 7 puertos UART, 2 i2c y puerto CAN.
Características:
Procesador STM32H743VIT6, 480MHz , 1MB RAM, 2MB Flash
IMU: ICM42688-P(V3)+ICM42605
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: MicroSD card socket (SDIO)
Puerto CAN
13 Salidas PWM
Compatible con Betaflight, iNAV, ArduPilot
Modulo Buzzer y USB externo
Multiplex BEC
* V3 incluye ICM42688-P en vez de ICM20605
La serie de controladoras de vuelo Mateksys H743, dispone de toda la potencia del procesador F7, pero el H7 ahora cuenta con más puertos. Este autopiloto tiene hasta 13 salidas de servo PWM, 7 puertos UART, 2 i2c y puerto CAN.
Características:
Procesador STM32H743VIT6, 480MHz , 1MB RAM, 2MB Flash
IMU: ICM42688-P(V3)+ICM42605
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: MicroSD card socket (SDIO)
Puerto CAN
13 Salidas PWM
Compatible con Betaflight, iNAV, ArduPilot
Modulo Buzzer y USB externo
Multiplex BEC

Para instalar esta aplicación web en su iPhone/iPad presione
![]() y luego Agregar a la pantalla de inicio.
y luego Agregar a la pantalla de inicio.
