

Matek AP_PERIPH CAN Monitor de Consumo Digital 85V 205A

CAN-L4-BM es un monitor de potencia digital ultrapreciso basado en el firmware TI INA239 y ArudPilot AP_Periph.
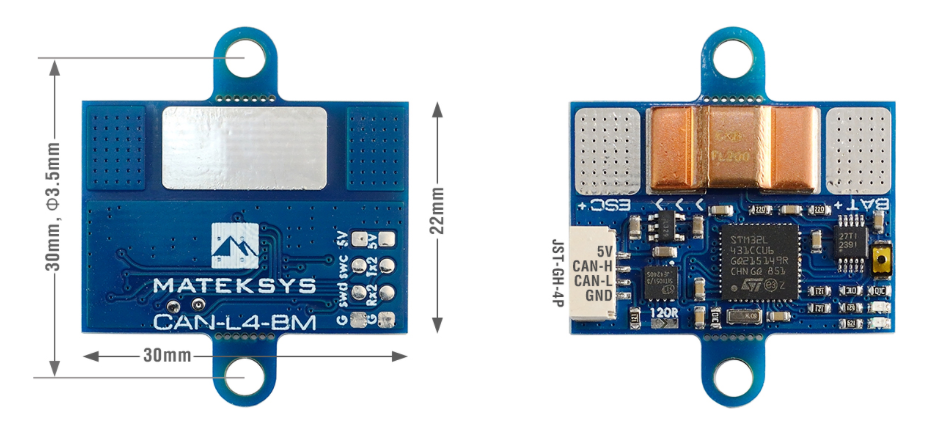
La resistencia de esta trayectoria conductora es típica de 200 μΩ, lo que proporciona una baja pérdida de potencia en la aplicación.
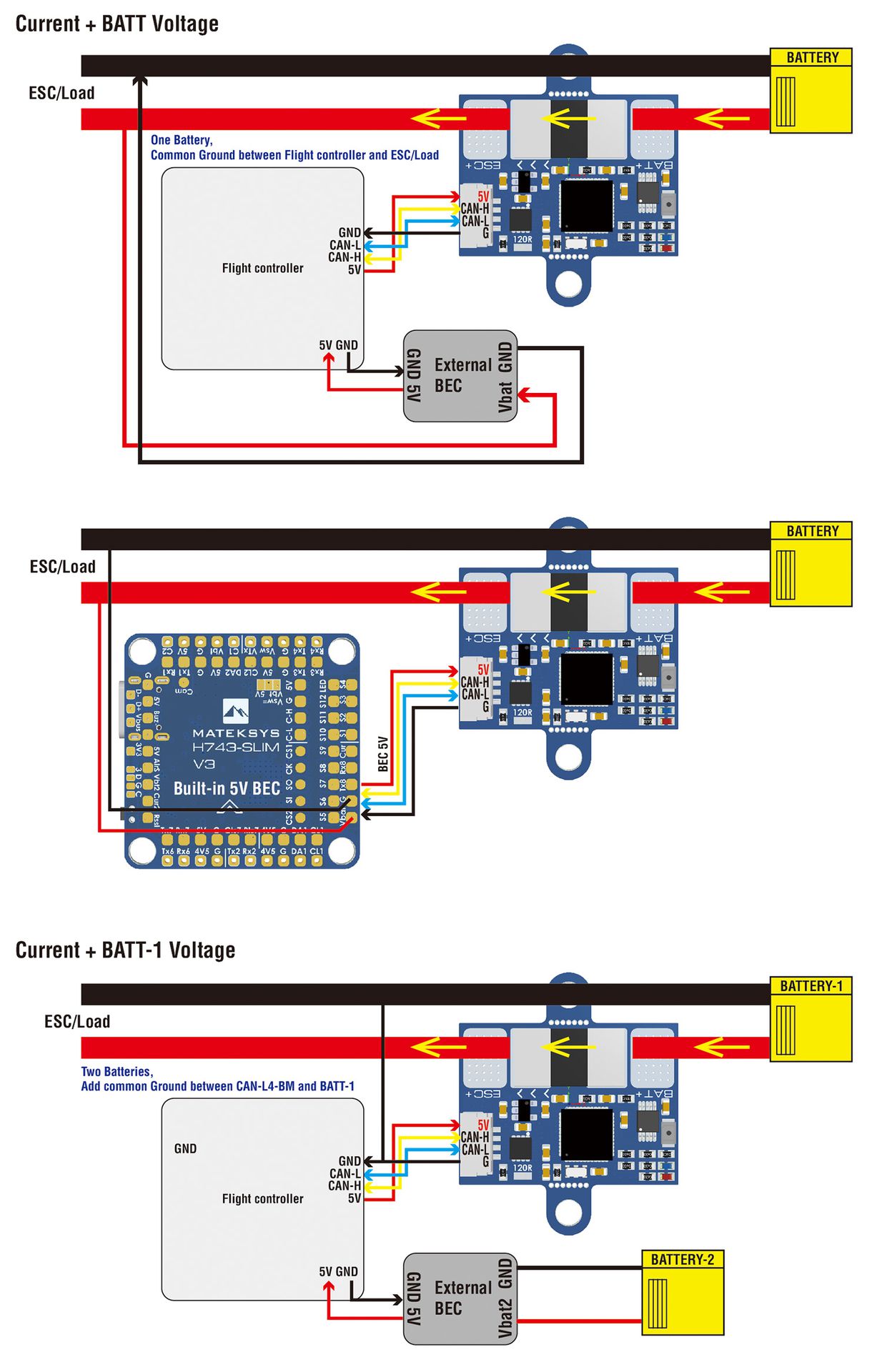
Con este dispositivo, no se requiere calibración, el controlador de vuelo que admite el protocolo DroneCAN puede obtener fácilmente lecturas precisas de corriente y voltaje del bus a través del bus CAN.
Consejos
La almohadilla grande en la parte inferior es una almohadilla muerta. No hay ninguna red de circuitos en él.
Suelde los cables positivos lo más cerca posible de ambos lados de la resistencia de detección de corriente.
Se pueden cortar 2 orejas para el montaje si no las necesitas.
Si los cables CAN son demasiado largos, puentea el puente "120R".
Firmware
ArduPilot AP_Periph MatekL431-BattMon
Update via DroneCAN GUI Tool
CAN-L4-BM es un monitor de potencia digital ultrapreciso basado en el firmware TI INA239 y ArudPilot AP_Periph.
La resistencia de esta trayectoria conductora es típica de 200 μΩ, lo que proporciona una baja pérdida de potencia en la aplicación.
Con este dispositivo, no se requiere calibración, el controlador de vuelo que admite el protocolo DroneCAN puede obtener fácilmente lecturas precisas de corriente y voltaje del bus a través del bus CAN.
Consejos
La almohadilla grande en la parte inferior es una almohadilla muerta. No hay ninguna red de circuitos en él.
Suelde los cables positivos lo más cerca posible de ambos lados de la resistencia de detección de corriente.
Se pueden cortar 2 orejas para el montaje si no las necesitas.
Si los cables CAN son demasiado largos, puentea el puente "120R".
Firmware
ArduPilot AP_Periph MatekL431-BattMon
Update via DroneCAN GUI Tool

Para instalar esta aplicación web en su iPhone/iPad presione
![]() y luego Agregar a la pantalla de inicio.
y luego Agregar a la pantalla de inicio.
