

CAN-L4-BM is a ultra-precise digital power monitor based on TI INA239 & ArudPilot AP_Periph firmware.
The resistance of this conductive path is 200 μΩ typical, providing low power loss in the application.
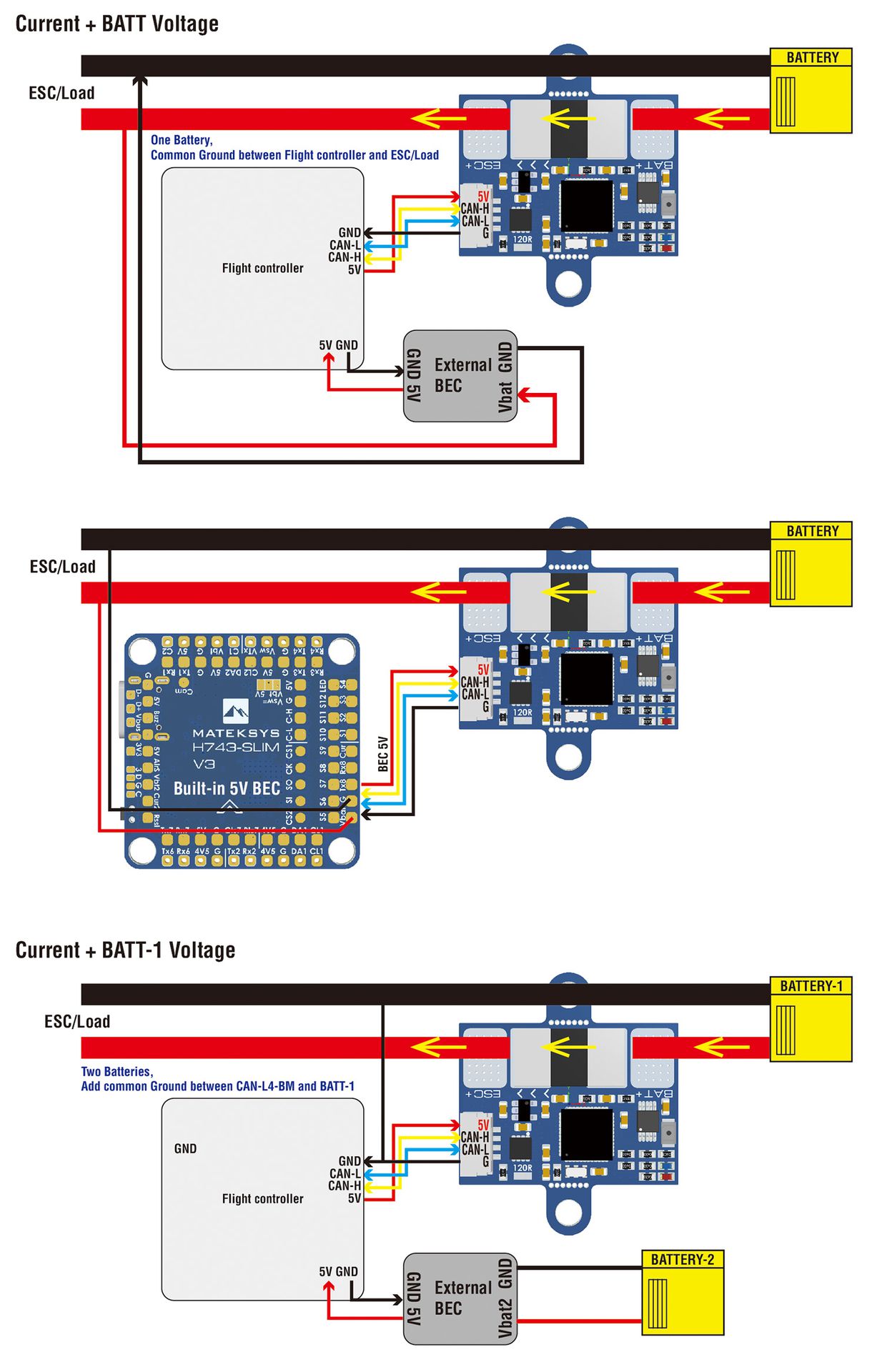
With this device, No calibration required, flight controller that support DroneCAN protocol can easily get accurate current & bus voltage readouts via CAN bus.
Tips
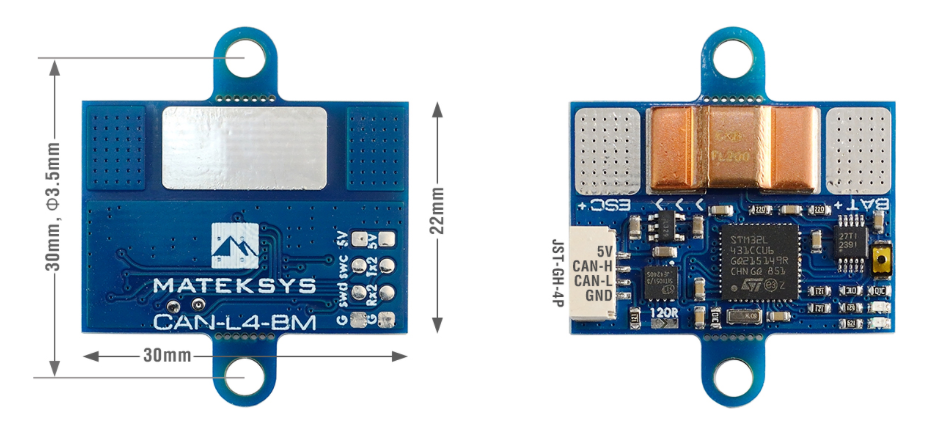
The big pad on the bottom side is a dead pad. No any circuit network on it.
Solder the positive wires as close as possible to both sides of the current sensing resistor.
2 ears for mounting can be cut off if you don’t need it.
If the CAN wires are too long, bridge the “120R” jumper.
Firmware
ArduPilot AP_Periph MatekL431-BattMon
Update via DroneCAN GUI Tool
CAN-L4-BM is a ultra-precise digital power monitor based on TI INA239 & ArudPilot AP_Periph firmware.
The resistance of this conductive path is 200 μΩ typical, providing low power loss in the application.
With this device, No calibration required, flight controller that support DroneCAN protocol can easily get accurate current & bus voltage readouts via CAN bus.
Tips
The big pad on the bottom side is a dead pad. No any circuit network on it.
Solder the positive wires as close as possible to both sides of the current sensing resistor.
2 ears for mounting can be cut off if you don’t need it.
If the CAN wires are too long, bridge the “120R” jumper.
Firmware
ArduPilot AP_Periph MatekL431-BattMon
Update via DroneCAN GUI Tool
Recommend Products

To install this Web App in your iPhone/iPad press
![]() and then Add to Home Screen.
and then Add to Home Screen.
