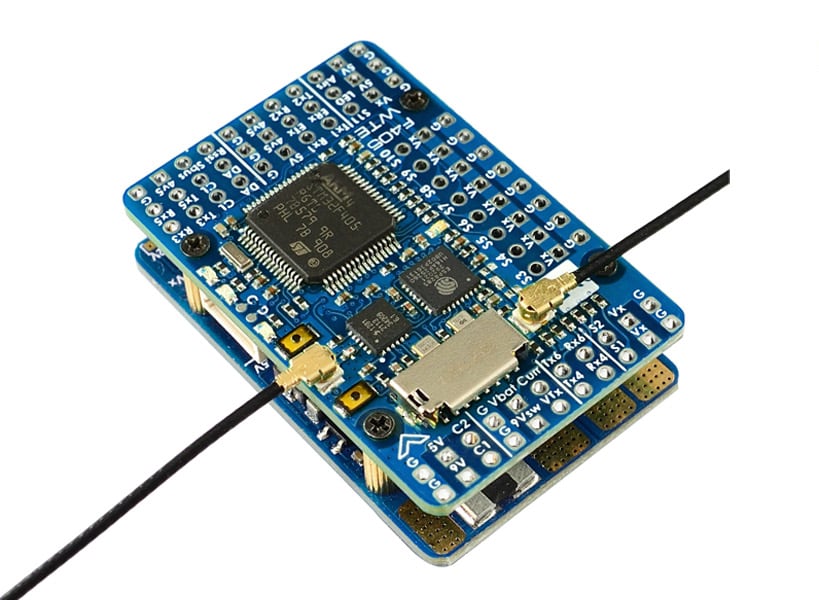


Flight Controller F405 WTE of Matek for Aircraft, with a micro STM32F405 MCU, and frequency of up to 168Mhz. The firmware of the flight controller is iNavFlight.
FC Specifications
MCU: 168MHz STM32F405
IMU: ICM42688-P
Baro: SPL06-001
OSD: INAV OSD w/ AT7456E chip
Blackbox: MicroSD card slot (SD/SDHC)
VCP & 6x UARTs, 1x Soft serial
12 PWM outputs
1x I2C
3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red)
Built in inverter for SBUS input (UART2-RX)
WIFI Telemetry or ELRS Receiver
Battery Voltage Sensor
WS2812 Led Strip : Yes
Beeper : Yes
RSSI: Yes
Recommend Products
Su snippet dinámico se mostrará aquí...
Este mensaje se muestra ya que no brindó ni un filtro ni una plantilla para usar.

To install this Web App in your iPhone/iPad press
![]() and then Add to Home Screen.
and then Add to Home Screen.
