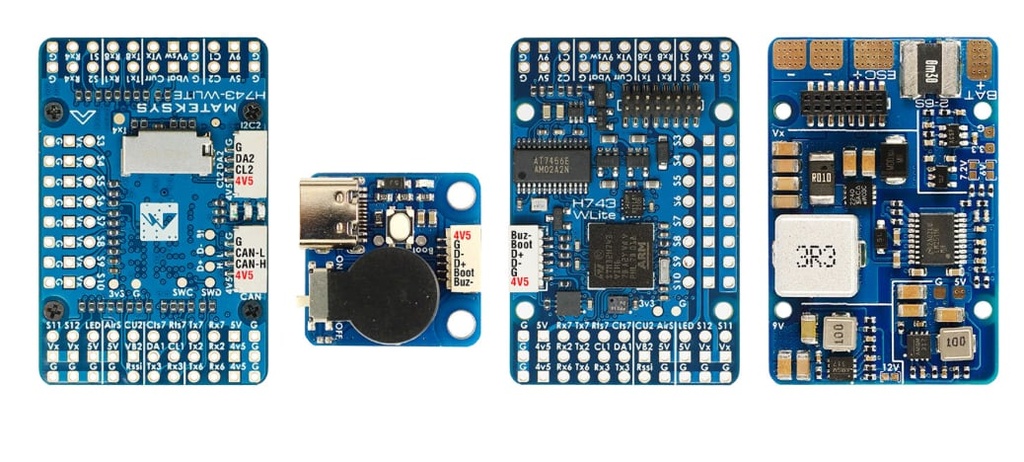



The Mateksys H743 series of flight controllers has all the power of the F7 processor, but the H7 now has more ports. This autopilot has up to 13 PWM servo outputs, 7 UART port, 2 i2c and CAN port.
Features:
Processor STM32H743VIH6, 480MHz , 512KB RAM, 2MB Flash
IMU: ICM42688-P
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: MicroSD card socket (SDIO)
CAN port
13 PWM output
Compatible with Betaflight, iNAV, ArduPilot
Multiplex BEC Output
External Buzzer and USB
The Mateksys H743 series of flight controllers has all the power of the F7 processor, but the H7 now has more ports. This autopilot has up to 13 PWM servo outputs, 7 UART port, 2 i2c and CAN port.
Features:
Processor STM32H743VIH6, 480MHz , 512KB RAM, 2MB Flash
IMU: ICM42688-P
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: MicroSD card socket (SDIO)
CAN port
13 PWM output
Compatible with Betaflight, iNAV, ArduPilot
Multiplex BEC Output
External Buzzer and USB
Recommend Products

To install this Web App in your iPhone/iPad press
![]() and then Add to Home Screen.
and then Add to Home Screen.
